

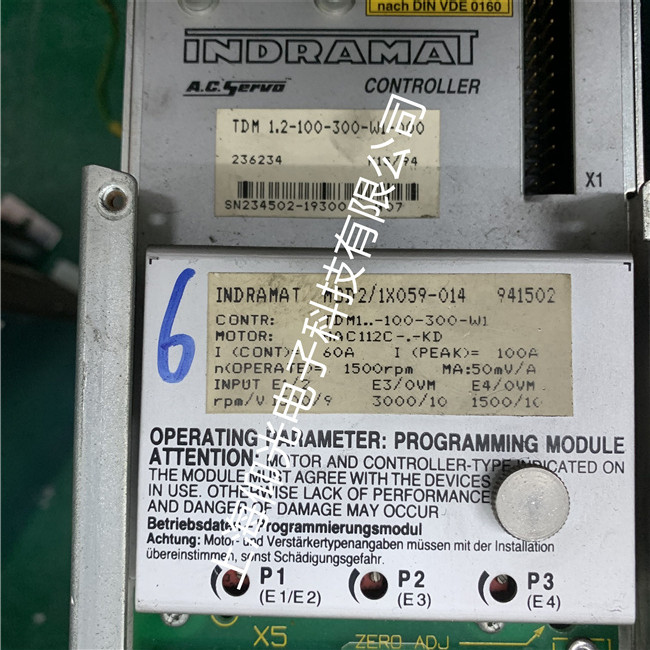
���A��ʿ���ŷ������S�����ŷ�������servo drives���ַQ�顰�ŷ��������������ŷ��Ŵ����������Á������ŷ�늙C��һ�N�������������������׃�l����������ͨ�����R�_�������ŷ�ϵ�y��һ���֣���Ҫ�����ڸ߾��ȵĶ�λϵ�y��һ����ͨ�^λ�á��ٶȺ��������N��ʽ���ŷ�늙C�M�п��ơ�
���A��ʿ���ŷ������S�ޣ�����ԭ�������
F2036 λ�Ì��Hֵ��^����ѭ�h�\���У���λ�Ì��Hֵ 1 ��λ�Ì��Hֵ 2 ֮�g�IJ����ҊP-0-0391�����a�� 1 - ���a�� 2 λ�Ì��Hֵ����c S-0-0391�����a�� 2 �O�ش����M�б��^�����������ڱO�ش��ڣ����҃��_���a�����ѻ��ʶ�λ����ô�͕��a������ F2036��
����ԭ��
���a�� 2 �ą����e�`
늙C�S�;��a�� 2 ֮�g�ęCе�b�Å����O���e�`
늙C�S�;��a�� 2 ֮�g�ęCе�b�ò��Թ̣������X݆�����g϶���D���ʣ��������x��ıO�ش���̫С
���a����|�p��
���a���ӿڵ�ݔ���l�ʳ������ֵ
���a�� 2 �]��b�����S��
���a���D�����O���e�`
��Q������
�z�� S-0-0115������ 2 λ�þ��a����ͺ� S-0-0117��ȡ�����a�� 2
�z�� S-0-0121��ؓ���X݆ݔ�����D��S-0-0122��ؓ���X݆ݔ�����D�� S-0-0123���M�o����
���P�]�����D���ʵ��X݆�r������ S-0-0391�����a�� 2 �O�ش���
���Q���a����|�������ٶ�
�� S-0-0391�����a�� 2 �ıO�ش����O�顰0�����P�]�O�ع��ܣ�
�z�龎�a����Ҫ�ą�������Ҫ�r�M�и�����P-0-0121��늙C��늙C���a�����ϵ��X݆ 1 /P-0-0122�����a����늙C���a�����ϵ��X݆ 1 P-0-0124��ؓ�ɣ����x���a�����ϵ��X݆ 2 /P-0-0125�����a�������x���a�����ϵ��X݆ 2 S-0-0121��ؓ���X݆ݔ�����D /S-0-0122��ؓ���X݆ݔ�����D
��ʿ���ŷ������^�d�S�ޣ�������ʾ��Ո�����в�ж�z��o�nj��I��ʿ������Խ��Խ��,��ɲ���Ҫ�Ľ����pʧ����һ��ϵ����һ��pʧ���Ϻ�������ӿƼ�����˾ ��錣ע�����Ԍ��I��
�D�dՈע����̎���Ϻ�������ӿƼ����I�ŷ������S��,�ŷ�늙C�S��
����朽ӣ�http://m.wliu56.com/fuwu/Services_Show10790.htm
�ŷ������S�� �ŷ�늙C�S�� �|�����S�� ׃�l���S��
�Ԓ��021-50157782
�֙C��13817011982 ��̖ͬ
�]�䣺shygdzi@163.com
ϵ�ˣ�����
�Wַ��http://m.wliu56.com
�� �҂��_���Üyԇ�ýo�͑�����������
��һƪ����Ĭ��PLC��ҊCPU�������ϾS����
